
NEUROSURGICAL BIOPSY PATH PLANNING AND ROBOTIC EXECUTION THROUGH MULTIDIMENSIONAL LEARNING FROM DEMONSTRATION

Can surgical robots learn from expert surgeons how to move safely inside the human brain?
This work explores how robots can acquire surgical skills by observing real demonstrations and combining them with medical imaging. Instead of following rigid, preprogrammed paths, the proposed approach allows robots to understand where it is safe to move and how to adapt expert motions to new situations. By learning from data and respecting critical brain structures, this framework points toward safer, more flexible, and more intelligent robotic assistance in neurosurgery.
INSIDE THE RESEARCH
Learning Robotic Trajectories Using HMM
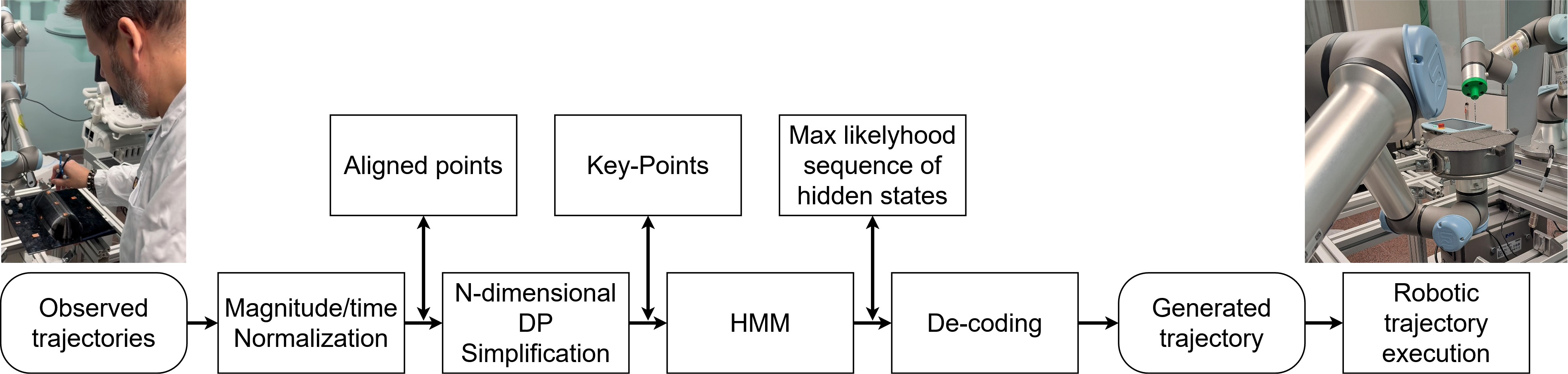
Probabilistic modeling of robotic trajectories based on expert demonstrations using Hidden Markov Models. The approach enables robots to capture essential motion patterns and reproduce movements with flexibility, supporting generalization beyond fixed, preprogrammed paths.
Multidimensional Trajectory Reduction for Learning from Demonstration
Reduction of high-dimensional motion data—including position, velocity, and orientation—through an extended Douglas–Peucker algorithm. This method preserves key motion features while simplifying trajectory representations, facilitating efficient learning and generalization in robotic systems.
Generation of Collision-Free Robot Trajectories
Design of collision-free 3D robot trajectories using path planning strategies suited for complex environments. The proposed methods improve motion safety and feasibility, providing practical tools for robotic applications that require precise and reliable navigation.
PATENT
Methods and systems for generating trajectories for a robotic system
Authors: Sabater-Navarro, Jose Maria; Manrique-Cordoba, Juliana; De La Casa-Lillo Miguel Angel.
Registration Number: N24 13 P004 EP
Publication Date: February 26, 2025

CONTRIBUTIONS
Learning surgical motion from expert demonstrations
Enabling robotic systems to acquire complex movements by observing expert behavior, reducing reliance on rigid, manually programmed trajectories.
Multidimensional motion representation
Incorporating position, velocity, orientation, and interaction forces, providing a richer and more realistic description of surgical motion.
Anatomy-aware trajectory planning
Integrating medical imaging and anatomical constraints into the motion planning process, allowing robots to generate trajectories that respect critical brain structures.
Safer autonomous robotic assistance
Improving the safety and reliability of robotic movements in sensitive environments, supporting autonomous or semi-autonomous surgical tasks.
Generalization of surgical skills
Allowing learned motions to be adapted to new situations and patient-specific anatomies, rather than simply repeating recorded demonstrations.
Foundations for intelligent surgical robotics
Providing a scalable framework that can be extended to other robotic platforms, surgical procedures, or learning-based control strategies.
FROM THE LAB TO THE CLASSROOM
Hidden Markov Models for Trajectory Learning
Introducing Hidden Markov Models applied to robotic trajectory learning, including model structure, parameter estimation, and sequence inference. The content provides a practical, step-by-step perspective for students and researchers interested in probabilistic modeling of motion data.
Inverse Kinematics of the UR3e Using Screw Theory
Inverse kinematic model of a UR3e collaborative robot based on the theory of screws. The material presents analytical solutions for all robot joints using well-established kinematic sub-problems, making it suitable for teaching advanced robotic kinematics.
Inverse Kinematics Implementation in MATLAB and Simulink
Implementation of the UR3e inverse kinematics in MATLAB and Simulink, designed as a hands-on resource for simulation, testing, and robotic control. This material supports learning through direct experimentation and integration with real robotic systems.




ADDITIONAL PUBLICATIONS
Autonomy in cooperative robotic systems for MIS
Sabater-Navarro, J. M., Garcia-Morales, I., Manrique-Cordoba, Juliana, & Munoz-Martinez, V. F. (2025). Autonomy in cooperative robotic systems for MIS. In J. Sanchez-Margallo & F. Sanchez-Margallo (Eds.), Robotic platforms for minimally invasive surgery. Academic Press. ISBN: 9780443217333
3D trayectory data optimization through an adaptation of the Douglas-Peucker algorithm: Application to surgical robotics
Manrique-Cordoba, Juliana, Cases-Hurtado, J., Romero-Ante, J. D., De la Casa Lillo, M. A., & Sabater-Navarro, J. M. (2024). 3D trayectory data optimization through an adaptation of the Douglas-Peucker algorithm: Application to surgical robotics. 2024 9th International Conference on Control and Robotics Engineering (ICCRE), 17–20. https://doi.org/10.1109/ICCRE61448.2024.10589822
Simulacion de la cinematica inversa basada en la formula de producto de exponenciales: Aplicacion al control articular del robot UR3e
Manrique-Cordoba, Juliana, Romero-Ante, J. D., Fuentes, V., & Sabater-Navarro, J. M. (2024). Simulacion de la cinematica inversa basada en la formula de producto de exponenciales: Aplicacion al control articular del robot UR3e. Actas del Simposio de Robotica, Bioingenieria y Vision por Computador: Badajoz, 29 a 31 de mayo de 2024, 19–24. ISBN 978-84-9127-262-5

Reduccion de puntos de una trayectoria 3D basada en el algoritmo Douglas-Peucker. Aplicacion a robotica quirurgica
Manrique-Cordoba, Juliana, Cases-Hurtado, J., Romero-Ante, J. D., de la Casa Lillo, M. A., & Sabater-Navarro, J. M. (2023). Reduccion de puntos de una trayectoria 3D basada en el algoritmo Douglas-Peucker. Aplicacion a robotica quirurgica. XLIV Jornadas de Automatica, 65–70. https://doi.org/10.17979/spudc.9788497498609.065
SAY HELLO!
Dra. Juliana Manrique Córdoba
Contact:
Universidad Miguel Hernandez de Elche